GlobalSpecies
We will start this chapter by studying a special species: the global species. In the global species, you can define the attributes, actions, and behaviors that describe the world agent. There is one unique world agent per simulation: it is this agent that is created when a user runs an experiment and that initializes the simulation through its init scope. The global species is a species like others and can be manipulated as them. In addition, the global species automatically inherits from several built-in variables and actions. Note that a specificity of the global species is that all its attributes can be referred by all agents of the simulation.
A GAMA model contains a unique global section that defines the global species.
global {
// definition of global attributes, actions, behaviours
}
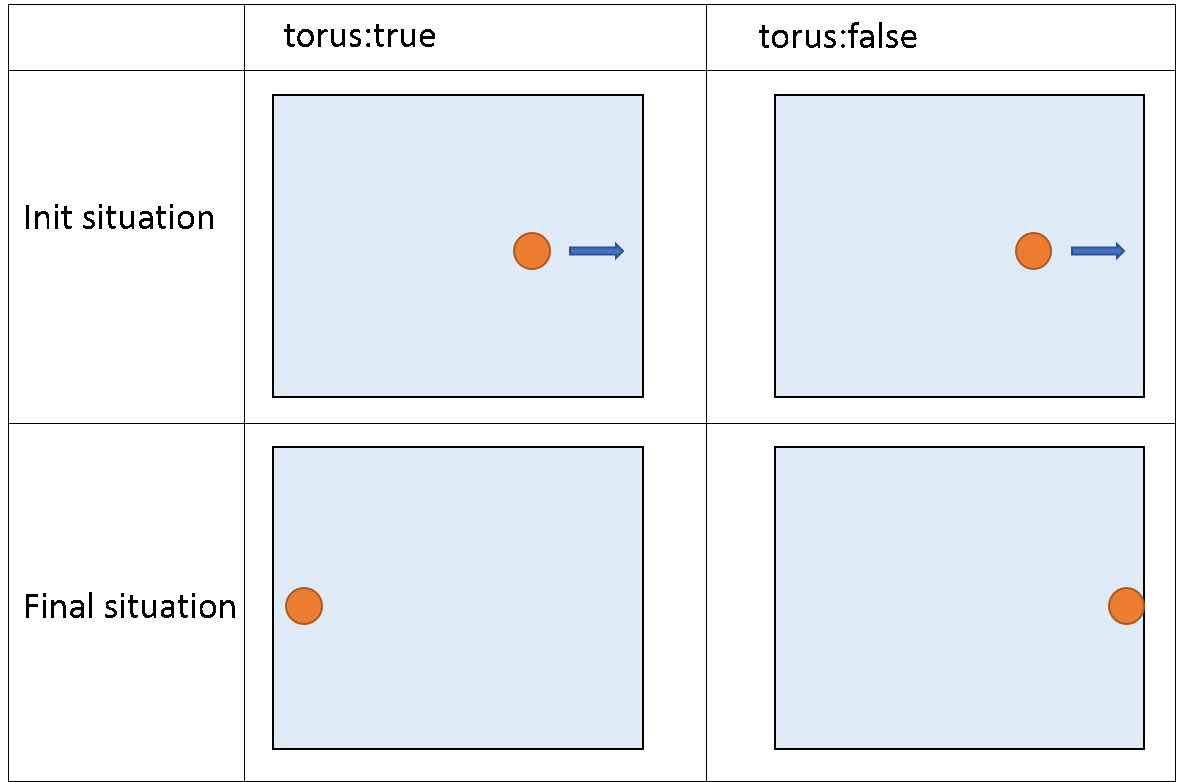
global can use facets, such as the torus facet, to make the environment a torus or not (if it is a torus, all the agents going out of the environment will appear on the other side. If it's not, the agents won't be able to go out of the environment). By default, the environment is not a torus.
global torus:true {
// definition of global attributes, actions, behaviours
}
Other facets such as control or schedules are also available, but we will explain them later.
Directly in the global scope, you have to declare all your global attributes (can be seen as "static members" in Java or C++). To declare them, proceed exactly as for declaring basic variables. Those attributes are accessible wherever you want inside the species scope.
In the global context, you have to define the size and shape for your environment. In fact, an attribute already exists for the global species (inherited from agent): it's called shape, and its type is a geometry. By default, shape is equal to a 100m*100m square. You can change the geometry of the shape by initializing it with another value:
geometry shape <- circle(50#mm);
geometry shape <- rectangle(10#m,20#m);
geometry shape <- polygon([{1°m,2°m},{3°m,50°cm},{3.4°m,60°dm}]);
Note that the final shape of the world will always be a rectangle equal to the envelope of the geometry provided.
nb: there are just examples. Try to avoid mixing dimensions! If no dimensions are specified, it will be meter by default.
Some attributes exist by default for the global species. The attribute shape is one of them (refers to the shape of the environment). Here is the list of the other built-in attributes:
Like the other attributes of the global species, global built-in attributes can be accessed (and sometimes modified) by the world agent and every other agent in the model.
- represents the sole instance of the model species (i.e. the one defined in the
globalsection). It is accessible from everywhere (including experiments) and gives access to built-in or user-defined global attributes and actions.
- contains the
experimentagent that has created this simulation agent.
- integer, read-only, designates the (integer) number of executions of the simulation cycles. Note that the first cycle is the cycle with number 0.
To learn more about time, please read the recipe about dates.
- float, is the length, in model time, of an interval between two cycles, in seconds. Its default value is 1 (second). Each turn, the value of time is incremented by the value of step. The definition of step must be coherent with that of the agents' variables like speed. The use of time units is particularly relevant for its definition.
To learn more about time, please read the recipe about dates.
global {
...
float step <- 10 #h;
...
}
- float, read-only, represents the current simulated time in seconds (the default unit). It is the time in the model time. Begins at zero. Basically, we have: time = cycle
*step .
global {
...
int nb_minutes function: { int(time / 60)};
...
}
To learn more about time, please read the recipe about dates.
- date, represent the starting date (resp. the current date) of the simulation. The
current_dateis updated from thestarting_dateby the valuestepat each simulation step.
To learn more about time, please read the recipe about dates.
- string, read-only, represents the value that is equal to the duration in real machine time of the last cycle.
- string, read-only, represents the sum of duration since the beginning of the simulation.
- string, read-only, represents the average of duration since the beginning of the simulation.
- float, read-only, represents the current machine time in milliseconds.
- float, the seed of the random number generator. It will influence the set of random numbers that will be generated all over the simulation. 2 simulations of a model with the same parameters' values should behave identically when the seed is set to the same value. If it is not redefined by the modeler, it will be chosen randomly.
- list, read-only, returns a list of all the agents of the model that are considered as "active" (i.e. all the agents with behaviors, excluding the places). Note that obtaining this list can be quite time consuming, as the world has to go through all the species and get their agents before assembling the result. For instance, instead of writing something like:
ask agents of_species my_species {
...
}
one would prefer to write (which is much faster):
ask my_species {
...
}
Note that any agent has the agents attribute, representing the agents it contains. So to get all the agents of the simulation, we need to access the agents of the world using: world.agents.
The global species is provided with two specific actions.
- pauses the simulation, which can then be continued by the user.
global {
...
reflex toto when: time = 100 {
do pause;
}
}
- stops the simulation (in fact it kills the simulation).
global {
...
reflex halting when: empty (agents) {
do die;
}
}
But beware, it will not kill the simulation, instead the simulation will continue running with a dead global species (so everything will close and nothing will happen except for the cycles still increasing). If you want to completely stop the simulation you will have to call the die action of the host of the global species.
global {
...
reflex halting when: empty (agents) {
ask host {
do die;
}
}
}
Other built-in actions are defined for the model species, just as in any other regular species.
After declaring all the global attributes and defining your environment size, you can define an initial state (before launching the simulation). Here, you normally initialize your global variables, and you instantiate your species. We will see in the next session how to initialize a regular species.