vrx_classic_sand_island_tutorial
This tutorial is the "hello world" of running the Gazebo WAM-V model with the associated plugins. The model is the base setup: the Sand Island world with a simple environment (waves) and a vehicle-only model and thrust plugin.
A description of the model implementation (hydrodynamics, waves, and propulsion simulation) is available at https://github.com/bsb808/robotx_docs/blob/master/theoryofoperation/theory_of_operation.pdf
Follow-on tutorials describe how to customize this base for particular vehicle and sensor configurations.
Please make sure you've followed the System Setup Tutorial and installed the VRX simulation platform before running this tutorial.
Source the ROS setup.bash file and the VRX setup.bash file:
source /opt/ros/noetic/setup.bash
source ./devel/setup.bashNote: You must source these files every time you start a new tutorial/open a new terminal.
- Use the provided launch file to run the Sand Island example:
$ roslaunch vrx_2019 sandisland.launchYou should see a new Gazebo window similar to this one:
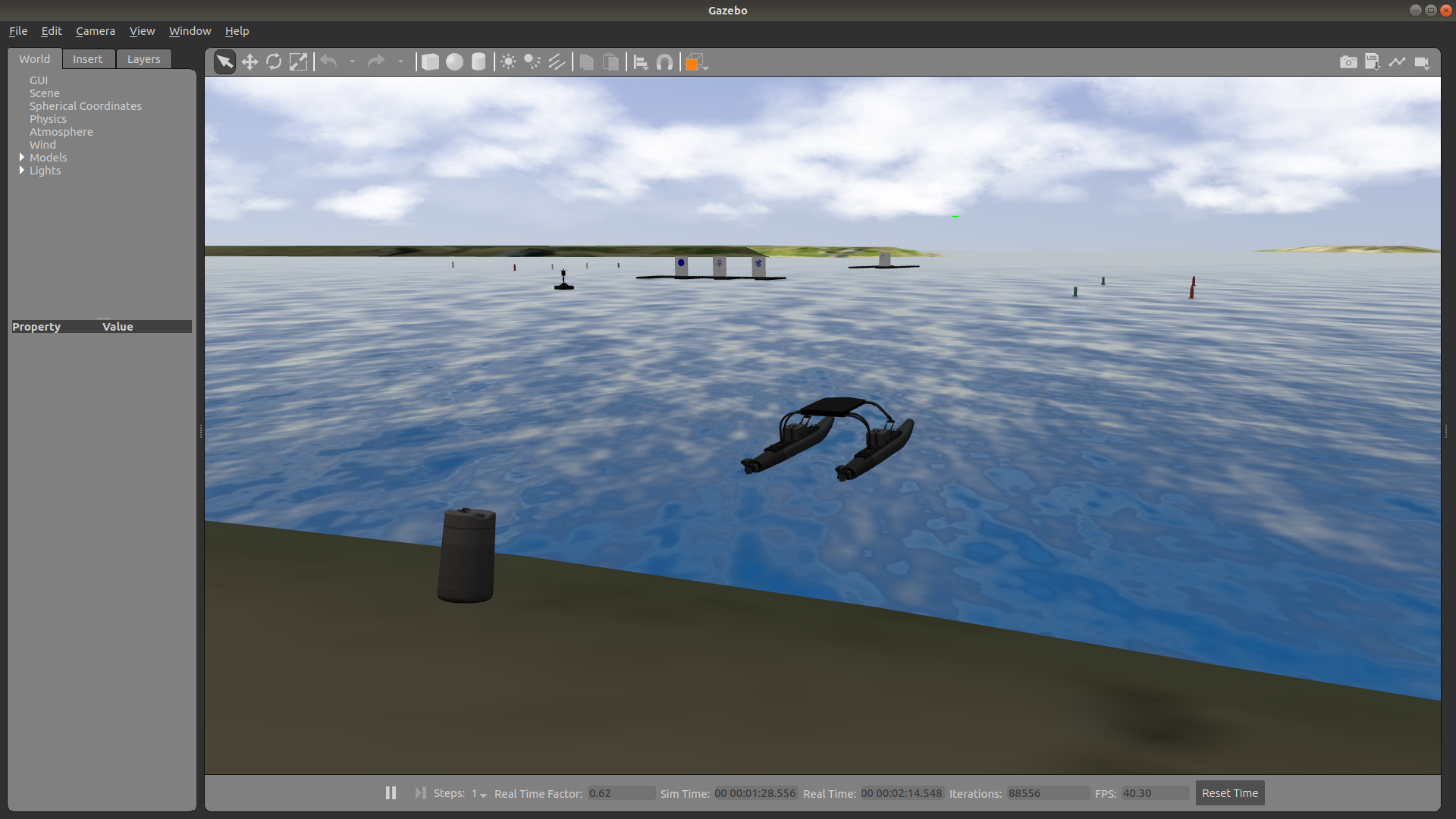
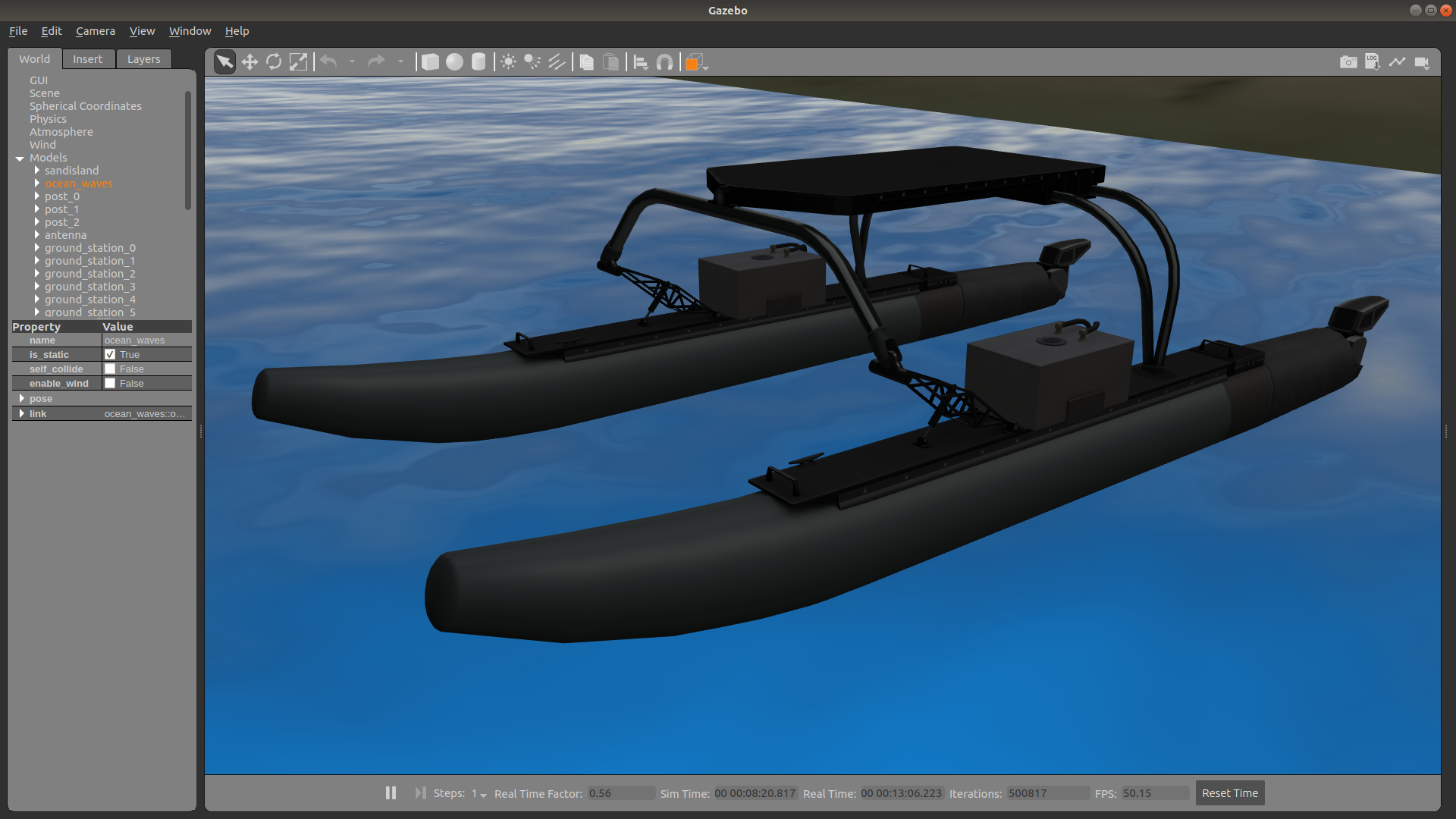
If you zoom in you will see the WAM-V model like this (use the scroll wheel for controlling the zoom, and click and hold it to adjust the angle):
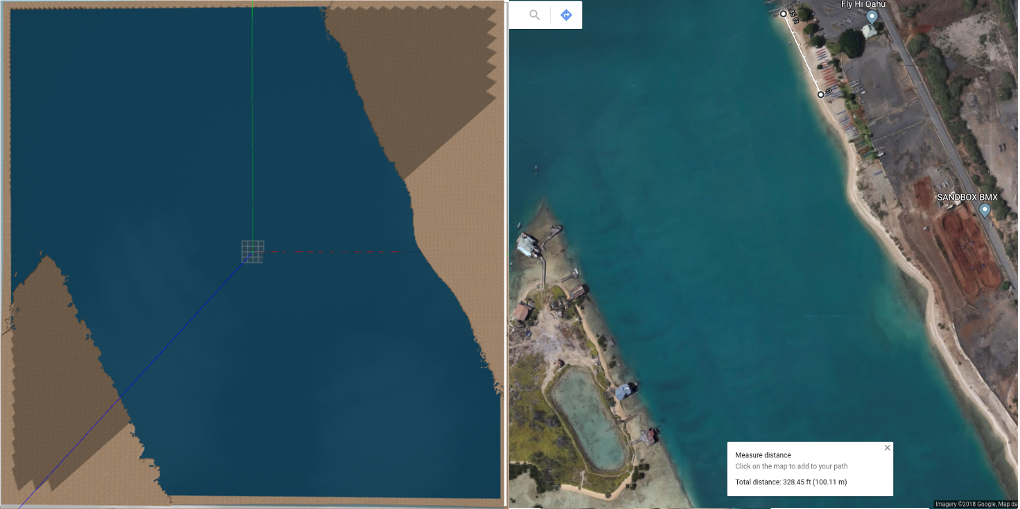
The shoreline is a coarse approximation of the RobotX 2018 competition area, Sand Island, Honolulu, HI.
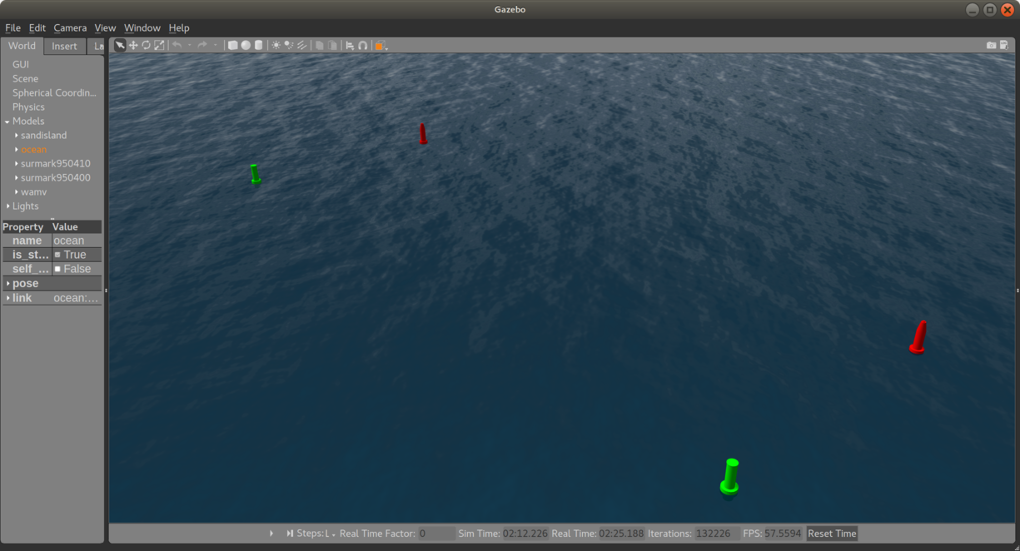
The navigation course task is represented by the two pairs of red and green buoys.
For an introduction to the Gazebo Graphical User Interface follow this tutorial.