vrx_2023 follow_the_path_task
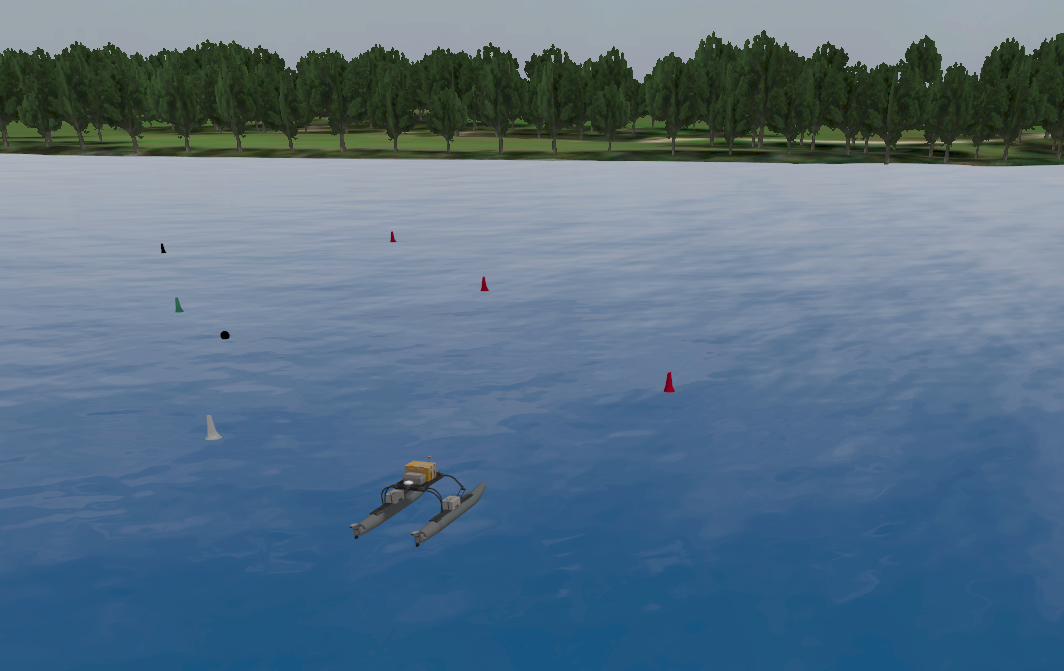
This task requires the system to traverse a channel marked by pairs of colored buoys, while avoiding obstacles.
ros2 launch vrx_gz competition.launch.py world:=follow_path_task
For the timeout counter and your current score, subscribe to the /vrx/task/info topic:
rostopic echo /vrx/task/info
- Navigate the channel, avoiding collisions with obstacles or buoys.
- To maximize score, the vehicle must traverse the gates in order.
- The first gate can be identified by the unique white buoy marking the left side of the channel. Crossing through this gate in the correct direction activates the course.
- Gates that are skipped or crossed in the wrong direction are out of play for the rest of the run and crossing them will not result in earning points. See the VRX 2023 Task Description Document for a full description of the rules and scoring for this task.
- Output in the terminal will let you know when a significant event has occurred - e.g. crossing a gate or colliding with an obstacle, as in this example:
[ruby $(which gz) sim-1] [Dbg] [NavigationScoringPlugin.cc:477] New gate crossed!
[ruby $(which gz) sim-1] [Dbg] [NavigationScoringPlugin.cc:493] Score: 10
[ruby $(which gz) sim-1] [Dbg] [ScoringPlugin.cc:631] [1] New collision counted between [wamv::wamv/base_link::wamv/base_link_fixed_joint_lump__left_front_float_collision_2] and [short_navigation_course_0::obstacle_0::link::collision]
[ruby $(which gz) sim-1] [Dbg] [NavigationScoringPlugin.cc:439] New penalty. score: 7
| Back: Wildlife Encounter and Avoid | Top: VRX Tutorials | Next: Acoustic Tracking |
|---|