Autonomy Quick Start
This assumes that you have already installed (and verified) ROS for our system if not follow this tutorial
This tutorial will take you through starting up the autonomy system and running the navigation code to hopefully be able to see the rover run in simulation.
From catkin_ws first run the navigation launch file:
roslaunch mrover simulator.launch
And in a separate terminal
roslaunch mrover autonomy.launch
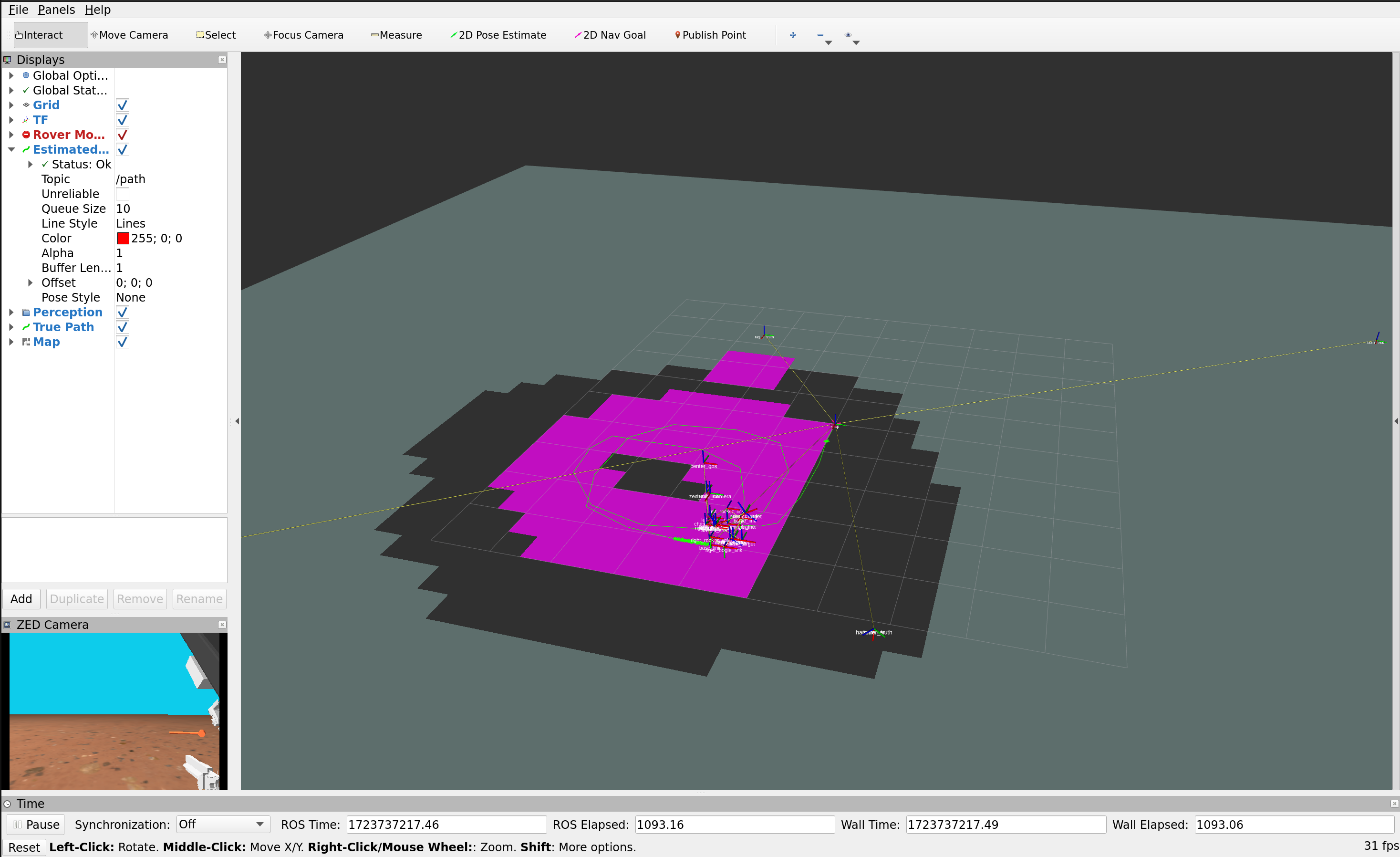
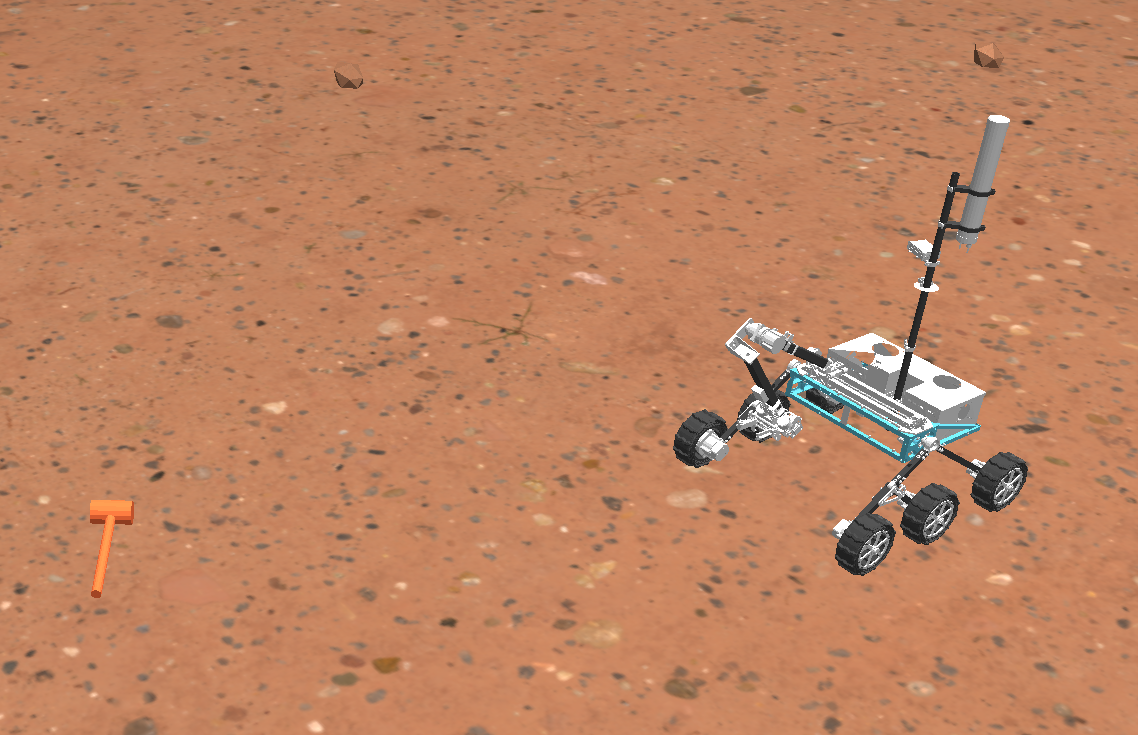
This starts the simulation environment and starts all necessary nodes for the autonomy mission.
Next from another terminal window/tab (in catkin_ws) run:
rosrun mrover visualizer.py
This will launch a state machine visualizer that should show you the structure of the state machine as well as highlight the current active state.

Now, from another terminal window/tab (in catkin_ws) run:
rosrun mrover debug_course_publisher.py
This will publish a test course to the navigation system and you should start to see the rover moving towards the waypoint and completing the autonomy mission as well as updates on the state machine visualizer regarding what state the rover is in.