Welcome to the VTOL (Vertical Take Off and Landing) Drone area dedicated to experimental research and development
about autonomous flying robots and multicopters.


All these informations are published free in Open Source under [GNU licence] (https://github.com/jlnaudin/x-VTOLdrone/blob/master/LICENSE) for a non-commercial and a private use only
#Latest News
-
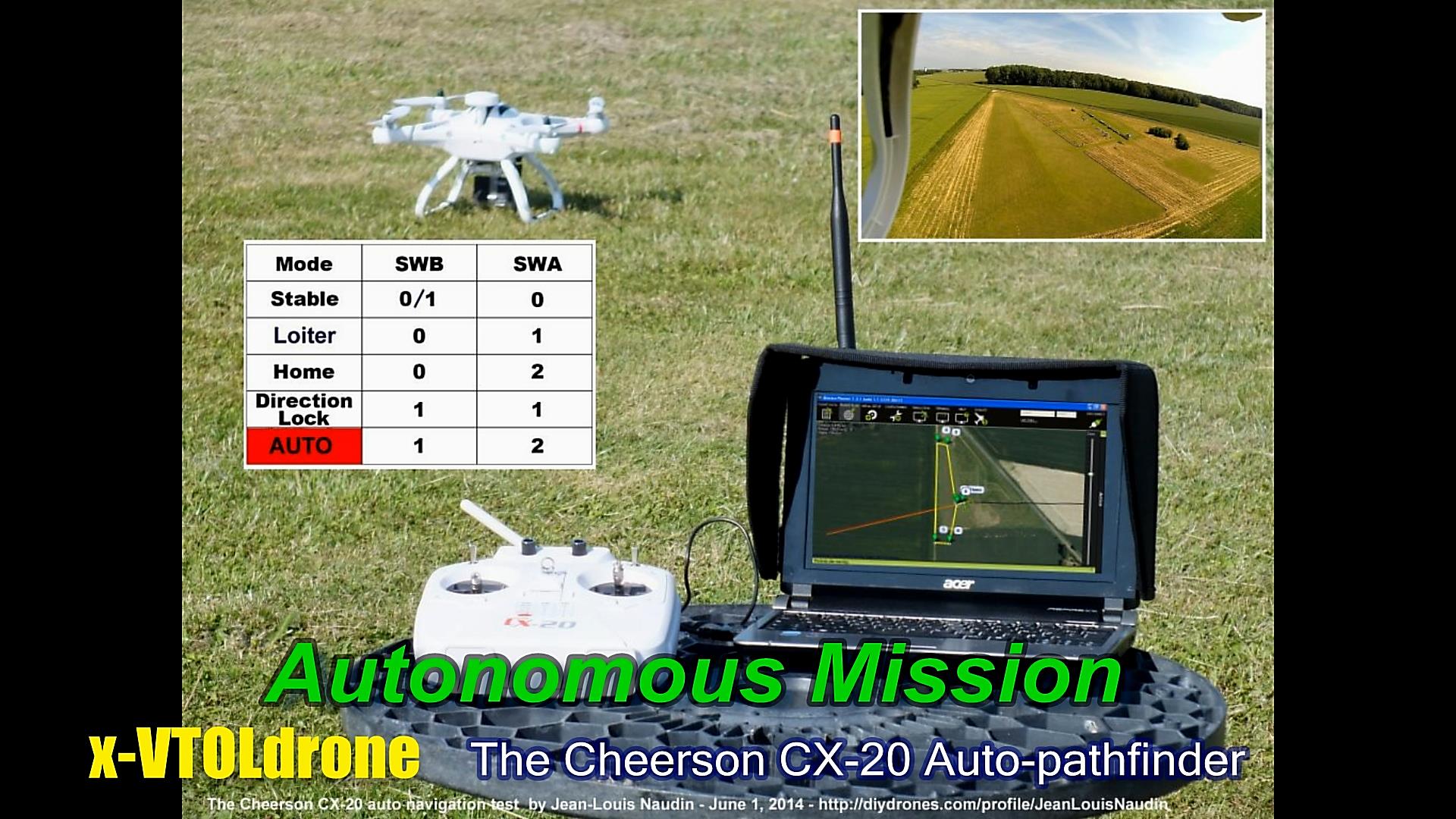
[TEST FLIGHT: Full autonomous mission with the Cheerson CX 20 Auto pathfinder (Quanum NOVA)] (https://github.com/jlnaudin/x-VTOLdrone/wiki/TEST-FLIGHT:-Full-autonomous-mission-with-the-Cheerson-CX-20-Auto-pathfinder-(Quanum-NOVA))
-
[Test flight: The Cheerson CX-20 auto-pathfinder tested with arducopter v3.1.2] (https://github.com/jlnaudin/x-VTOLdrone/wiki/CX-20-Auto-pathfinder-(Cheerson)-tested-with-the-APM---ArduCopter-v3.1.2---maiden-flight)
The VIDEO of the maiden flight with the CX-20 and filmed from the GoPro 3:

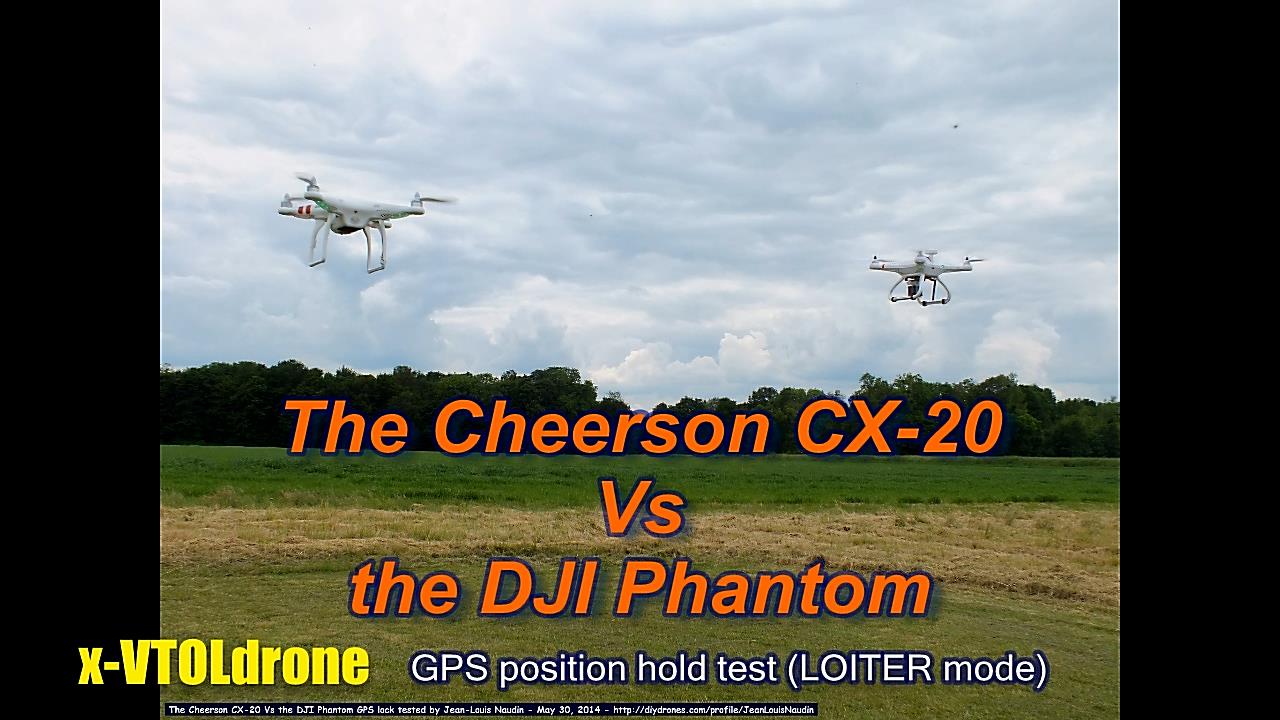
The Cheerson CX-20 Vs the DJI Phantom in GPS Position Hold (LOITER):
- [F-450 AIOP quadcopter successfully tested in flight with the Arducopter MPNG v3.0-r4:] (https://github.com/jlnaudin/x-VTOLdrone/blob/master/ArduCopter%20MPNG/README.md)
Full autonomous mission with the SPIDER quad with a GoPro3 stabilized with a gimbal:

- [PX4 F450 quadcopter built and tested in flight] (https://github.com/jlnaudin/x-VTOLdrone/wiki/PX4-F450-quadcopter-built-and-tested-in-flight)
The VIDEO of gimbal flight on the Spider quadcopter with the BruGi 049 firmware:

- [Tuto: The Spider quadcopter, Build & Fly] (https://github.com/jlnaudin/x-VTOLdrone/wiki/Tuto:-The-Spider-quadcopter,-Build-&-Fly)
- [Gimbal Testing the RCtimer 2 axis Gimbal IMU board v1.1 with the BruGi 049 firmware] (https://github.com/jlnaudin/x-VTOLdrone/wiki/Gimbal---Testing-the-RCtimer-2-axis-Gimbal-IMU-board-v1.1-with-the-BruGi-049-firmware)


The VIDEO of gimbal test flight with the BruGi 049 firmware:



Visit the x-drone area: https://github.com/jlnaudin/x-drone
More infos at: http://diydrones.com/profile/JeanLouisNaudin
Flights videos at: http://vimeo.com/user5037815/videos