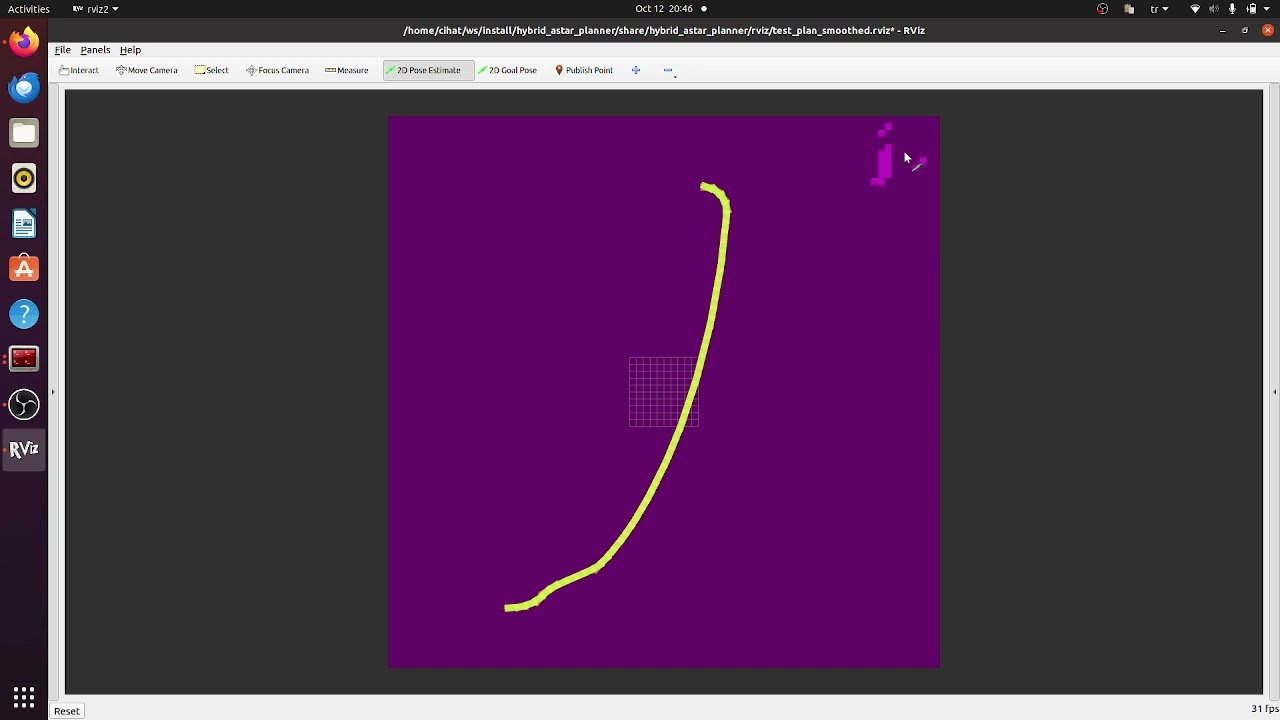
Hybrid A* Path Planner For Ackermann Vehicles
git clone https://github.com/CihatAltiparmak/hybrid_astar_path_planner.git
cd hybrid_astar_path_planner
docker build . -t hybrid_astar_planner
xhost +
docker run -it --env="DISPLAY=$DISPLAY" --env="QT_X11_NO_MITSHM=1" --volume="/tmp/.X11-unix:/tmp/.X11-unix:rw" --env="XAUTHORITY=$XAUTH" --volume="$XAUTH:$XAUTH" --net=host --privileged --runtime=nvidia hybrid_astar bash src/hybrid_astar_path_planner/run_planner_demo.sh
- Planner has not been tuned. It is necessary to tune parameters for planner. The cause of executing slowly maybe can be given rise to map size, cell size etc.
- Change map tool from grid_map to costmap
- Change specific message format of planner to nav_msgs/Path
- Modify planner rviz plugin based on given message format (for above statement)